Exo Glove
Overview
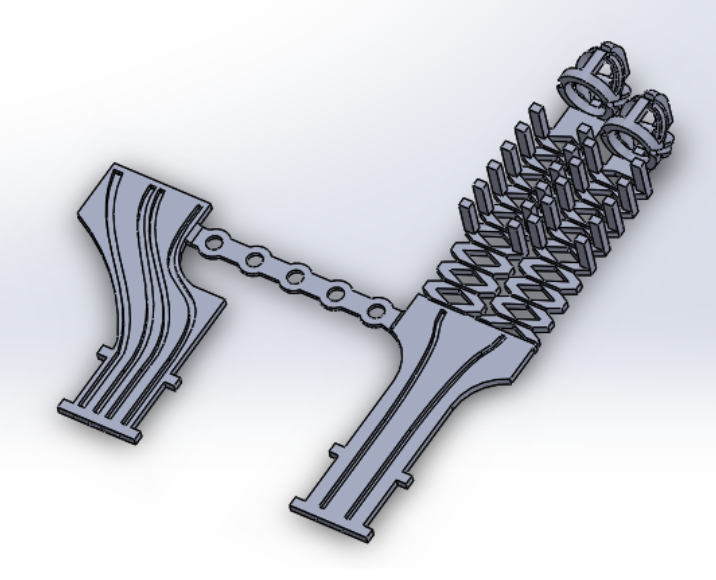
A wearable assistive device designed to aid patients with hand paralysis or weakness. The glove utilizes a differential tendon routing mechanism to distribute force evenly across fingers, enabling effective grasping.
Key Contributions
- ●Performed ANSYS simulations to validate structural integrity.
- ●Prototyped the glove using FDM 3D printing using TPU.
- ●Assembled the final prototype and tested working.
Technologies
SolidWorksANSYSFDM 3D PrintingDifferential Mechanism
Team
- Waleed Bin Mehdi
- Usama Jahangir